本記事では、弾性コンプライアンスと弾性スティフネスの関係式を示します。
Webページ上では要点のみを示しますので、細かな式展開については本ページ下部のpdfファイルをご確認ください。
弾性コンプライアンスとHookeの法則
弾性変形では、応力(Stress)を\(\sigma_{ij}\)、ひずみ(Strain)を\(\varepsilon_{ij}\)、弾性スティフネス(Elastic stiffness)を\(C_{ijkl}\)とすると、Hookeの法則(フックの法則: Hooke’s law)が成立します。
Hooke’s law
$$
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
\boldsymbol{\sigma}_2 \\
\boldsymbol{\sigma}_2 \\
\end{array}
\right]
=
\mathbf{C}_9
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
\boldsymbol{\varepsilon}_2 \\
\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
\tag{1}
$$
$$
\mathbf{C}_9
=
\left[
\begin{array}{ccc}
\mathbf{C}_1 & \mathbf{C}_2 & \mathbf{C}_2 \\
^{\mathrm{t}} \! \mathbf{C}_2 & \mathbf{C}_3 & \mathbf{C}_3 \\
^{\mathrm{t}} \! \mathbf{C}_2 & \mathbf{C}_3 & \mathbf{C}_3 \\
\end{array}
\right]
\tag{2}
$$
部分行列の定義
$$
\boldsymbol{\sigma}_1=
^{\mathrm{t}} \! \left[
\begin{array}{ccc}
\sigma_{11} & \sigma_{22} & \sigma_{33} \\
\end{array}
\right]
$$
$$
\boldsymbol{\sigma}_2=
^{\mathrm{t}} \! \left[
\begin{array}{ccc}
\sigma_{23} & \sigma_{31} & \sigma_{12} \\
\end{array}
\right]
$$
$$
\boldsymbol{\varepsilon}_1=
^{\mathrm{t}} \! \left[
\begin{array}{ccc}
\varepsilon_{11} & \varepsilon_{22} & \varepsilon_{33} \\
\end{array}
\right]
$$
$$
\boldsymbol{\varepsilon}_2=
^{\mathrm{t}} \! \left[
\begin{array}{ccc}
\varepsilon_{23} & \varepsilon_{31} & \varepsilon_{12} \\
\end{array}
\right]
$$
$$
\mathbf{C}_1=
\left[
\begin{array}{ccc}
C_{1111} & C_{1122} & C_{3311} \\
C_{1122} & C_{2222} & C_{2233} \\
C_{3311} & C_{2233} & C_{3333} \\
\end{array}
\right]
$$
$$
\mathbf{C}_2=
\left[
\begin{array}{ccc}
C_{1123} & C_{1131} & C_{1112} \\
C_{2223} & C_{2231} & C_{2212} \\
C_{3323} & C_{3331} & C_{3312} \\
\end{array}
\right]
$$
$$
\mathbf{C}_3=
\left[
\begin{array}{ccc}
C_{2323} & C_{2331} & C_{2312} \\
C_{2331} & C_{3131} & C_{3112} \\
C_{2312} & C_{3112} & C_{1212} \\
\end{array}
\right]
$$
なお、Eq. (1)の記述には\(\sigma_{ij}\), \(\varepsilon_{ij}\), \(C_{ijkl}\)の対称性を用いています。
\(\sigma_{ij}\)の対称性
$$ \sigma_{ij}=\sigma_{ji} \tag{3} $$
\(\varepsilon_{ij}\)の対称性
$$ \varepsilon_{ij}=\varepsilon_{ji} \tag{4} $$
\(C_{ijkl}\)の対称性
$$ C_{ijkl}=C_{jikl}=C_{ijlk}=C_{klij} \tag{5} $$

弾性コンプライアンス(Elastic compliance)\(S_{ijkl}\)は\(C_{ijkl}\)の逆数に相当する概念であり、\(S_{ijkl}\)を用いるとHookeの法則は以下のように表現できます。
Hooke’s law
$$
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
\boldsymbol{\varepsilon}_2 \\
\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
=
\mathbf{S}_9
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
\boldsymbol{\sigma}_2 \\
\boldsymbol{\sigma}_2 \\
\end{array}
\right]
\tag{6}
$$
$$
\mathbf{S}_9
=
\left[
\begin{array}{ccc}
\mathbf{S}_1 & \mathbf{S}_2 & \mathbf{S}_2 \\
^{\mathrm{t}} \! \mathbf{S}_2 & \mathbf{S}_3 & \mathbf{S}_3 \\
^{\mathrm{t}} \! \mathbf{S}_2 & \mathbf{S}_3 & \mathbf{S}_3 \\
\end{array}
\right]
\tag{7}
$$
部分行列の定義
$$
\mathbf{S}_1=
\left[
\begin{array}{ccc}
S_{1111} & S_{1122} & S_{3311} \\
S_{1122} & S_{2222} & S_{2233} \\
S_{3311} & S_{2233} & S_{3333} \\
\end{array}
\right]
$$
$$
\mathbf{S}_2=
\left[
\begin{array}{ccc}
S_{1123} & S_{1131} & S_{1112} \\
S_{2223} & S_{2231} & S_{2212} \\
S_{3323} & S_{3331} & S_{3312} \\
\end{array}
\right]
$$
$$
\mathbf{S}_3=
\left[
\begin{array}{ccc}
S_{2323} & S_{2331} & S_{2312} \\
S_{2331} & S_{3131} & S_{3112} \\
S_{2312} & S_{3112} & S_{1212} \\
\end{array}
\right]
$$
Eqs. (6, 7)の記述には\(S_{ijkl}\)の対称性を用いています。なお、このEq. (8)はEq. (5)と同様の手順で導くことができます。
\(S_{ijkl}\)の対称性
$$ S_{ijkl}=S_{jikl}=S_{ijlk}=S_{klij} \tag{8} $$
Eq. (1)とEq. (6)を比較すると、\(\mathbf{S}_9\)は、\(\mathbf{C}_9\)の逆行列(\(\mathbf{C}_9^{-1}\))であるように思われます。
しかし、Eq. (1)から明らかなように、\(\mathbf{C}_9\)には同一の行および列が存在しており、\(\mathrm{det} \left( \mathbf{C}_9 \right)=0 \)となるため、\(\mathbf{C}_9^{-1}\)は存在しません。
Voigt表記(フォークト表記:Voigt notation)を用いて、6×6の行列として\(C_{ijkl}\), \(S_{ijkl}\)を記述すると、9×9の行列における行と列の重複を回避することができます。
Voigt表記を用いると、Hookeの法則は以下のように表現できます。
Hooke’s law
$$
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
\boldsymbol{\sigma}_2 \\
\end{array}
\right]
=
\mathbf{C}
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
2\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
\tag{9}
$$
$$
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
=
\mathbf{S}
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
2\boldsymbol{\sigma}_2 \\
\end{array}
\right]
\tag{10}
$$
$$
\mathbf{C}
=
\left[
\begin{array}{ccc}
\mathbf{C}_1 & \mathbf{C}_2 \\
^{\mathrm{t}} \! \mathbf{C}_2 & \mathbf{C}_3 \\
\end{array}
\right]
\tag{11}
$$
$$
\mathbf{S}
=
\left[
\begin{array}{ccc}
\mathbf{S}_1 & \mathbf{S}_2 \\
^{\mathrm{t}} \! \mathbf{S}_2 & \mathbf{S}_3 \\
\end{array}
\right]
\tag{12}
$$
この\(\mathbf{C}\)には重複する行や列はありませんが、Eqs. (9, 10)では右辺のひずみと応力に係数2が掛かっている項があり、\(\mathbf{S}\)が\(\mathbf{C}^{-1}\)であるとは言えません。
このように、\(\mathbf{S}\)と\(\mathbf{C}\)の関係は、単純に見えて意外と簡単ではありません。次章では、Eqs. (9, 10)をさらに変形することで\(\mathbf{S}\)と\(\mathbf{C}\)の関係式を導きます。
弾性コンプライアンスと弾性スティフネス
Eqs. (9, 10)を変形すると以下の式が得られます。
$$
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
\boldsymbol{\sigma}_2 \\
\end{array}
\right]
=
\left[
\begin{array}{cc}
\mathbf{C}_1 & 2\mathbf{C}_2 \\
^{\mathrm{t}} \! \mathbf{C}_2 & 2\mathbf{C}_3 \\
\end{array}
\right]
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
\tag{1-1}
$$
$$
\left[
\begin{array}{c}
\boldsymbol{\varepsilon}_1 \\
\boldsymbol{\varepsilon}_2 \\
\end{array}
\right]
=
\left[
\begin{array}{cc}
\mathbf{S}_1 & 2\mathbf{S}_2 \\
^{\mathrm{t}} \! \mathbf{S}_2 & 2\mathbf{S}_3 \\
\end{array}
\right]
\left[
\begin{array}{c}
\boldsymbol{\sigma}_1 \\
\boldsymbol{\sigma}_2 \\
\end{array}
\right]
\tag{1-2}
$$
Eq. (1-1)をEq. (1-2)に代入あるいは、その逆に代入して整理すると以下の式が得られます。
$$
\left[
\begin{array}{cc}
\mathbf{S}_1 & 2\mathbf{S}_2 \\
^{\mathrm{t}} \! \mathbf{S}_2 & 2\mathbf{S}_3 \\
\end{array}
\right]
\left[
\begin{array}{cc}
\mathbf{C}_1 & 2\mathbf{C}_2 \\
^{\mathrm{t}} \! \mathbf{C}_2 & 2\mathbf{C}_3 \\
\end{array}
\right]
=
\left[
\begin{array}{cc}
\mathbf{C}_1 & 2\mathbf{C}_2 \\
^{\mathrm{t}} \! \mathbf{C}_2 & 2\mathbf{C}_3 \\
\end{array}
\right]
\left[
\begin{array}{cc}
\mathbf{S}_1 & 2\mathbf{S}_2 \\
^{\mathrm{t}} \! \mathbf{S}_2 & 2\mathbf{S}_3 \\
\end{array}
\right]
=
\left[
\begin{array}{cc}
\mathbf{E} & \mathbf{O} \\
\mathbf{O} & \mathbf{E} \\
\end{array}
\right]
\tag{1-3}
$$
\(\mathbf{C}_1, \mathbf{C}_3\)が正則行列でありかつ対称行列であることを用いて、Eq. (1-3)を整理すると\(S_{ijkl}\)と\(C_{ijkl}\)の関係式が得られます。
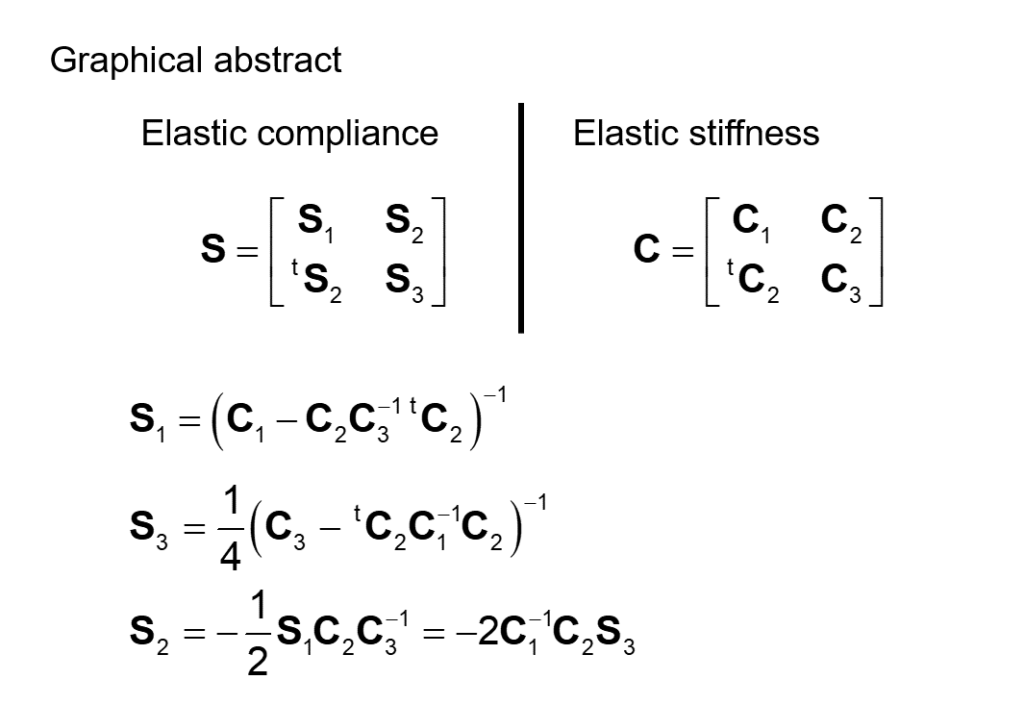
$$ \mathbf{S}_1=\left( \mathbf{C}_1 -\mathbf{C}_2 \mathbf{C}_3^{-1} {}^{\mathrm{t}} \! \mathbf{C}_2 \right)^{-1} \tag{1-4} $$
$$ \mathbf{S}_3=\frac{1}{4} \left( \mathbf{C}_3 – {}^{\mathrm{t}} \! \mathbf{C}_2 \mathbf{C}_1^{-1} \mathbf{C}_2 \right)^{-1} \tag{1-5} $$
$$ \mathbf{S}_2=-\frac{1}{2} \mathbf{S}_1 \mathbf{C}_2 \mathbf{C}_3^{-1}=-2 \mathbf{C}_1^{-1} \mathbf{C}_2 \mathbf{S}_3 \tag{1-6} $$
なお、Eqs. (1-4~1-6)を用いると、以下の関係式が得られます。
$$
\mathbf{S}_9 \mathbf{C}_9
=
\mathbf{C}_9 \mathbf{S}_9
=
\left[
\begin{array}{ccc}
\mathbf{E} & \mathbf{O} & \mathbf{O} \\
\mathbf{O} & \frac{1}{2} \mathbf{E} & \frac{1}{2} \mathbf{E} \\
\mathbf{O} & \frac{1}{2} \mathbf{E} & \frac{1}{2} \mathbf{E} \\
\end{array}
\right]
\tag{1-7}
$$
詳細な式展開(PDFファイル)
関連ページ
弾性定数の対称性(基本的な対称性)
直方晶・正方晶・立方晶・等方弾性体の弾性定数
六方晶の弾性定数